Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Add a point at robot position
Add a point at robot position
Add navigation point at current robot location.
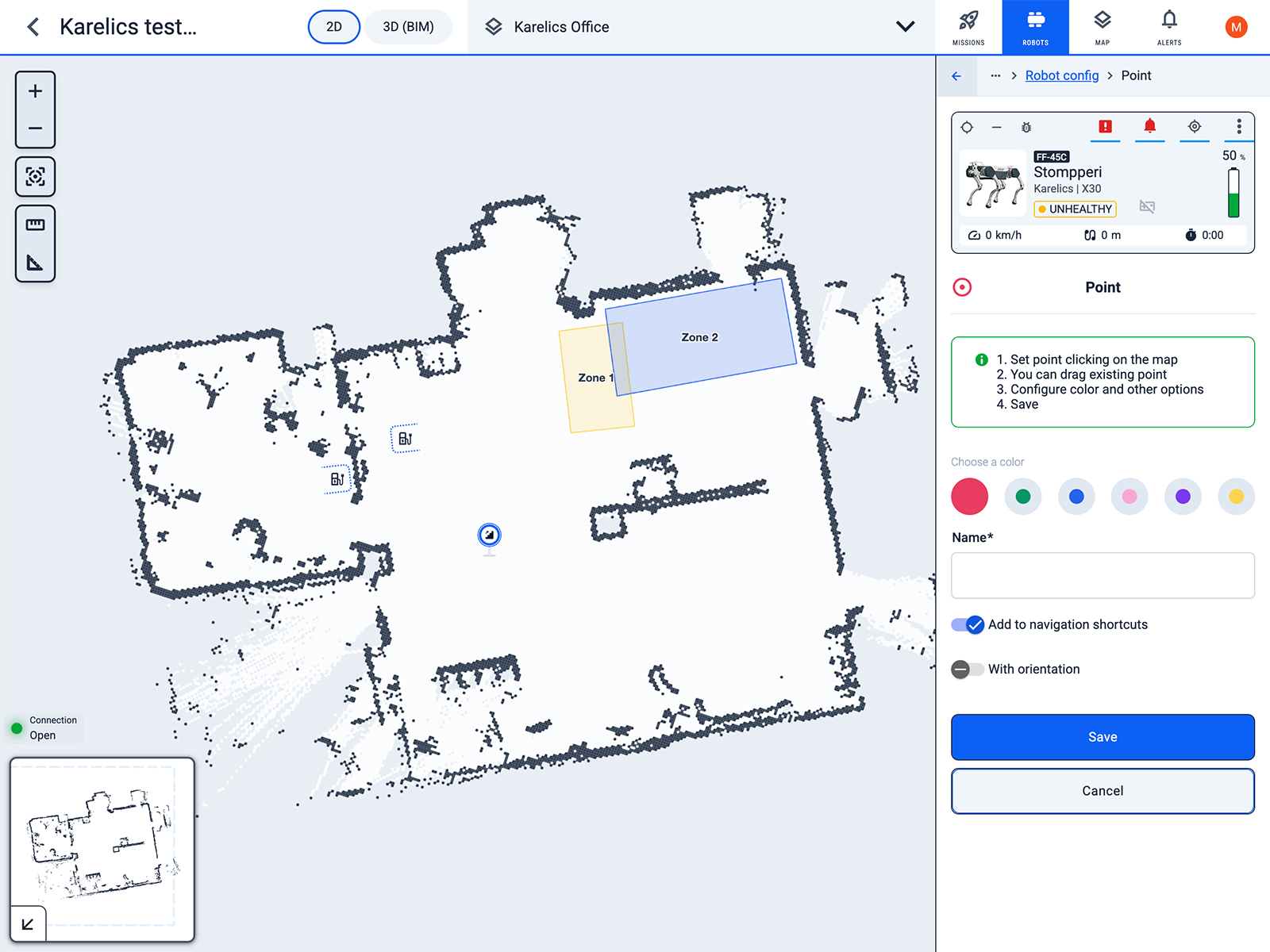
- Set point clicking on the map
- You can drag existing point
- Configure color and other options
- Save