Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Create new floor
Create new floor
Create a new floor plan for the robot.
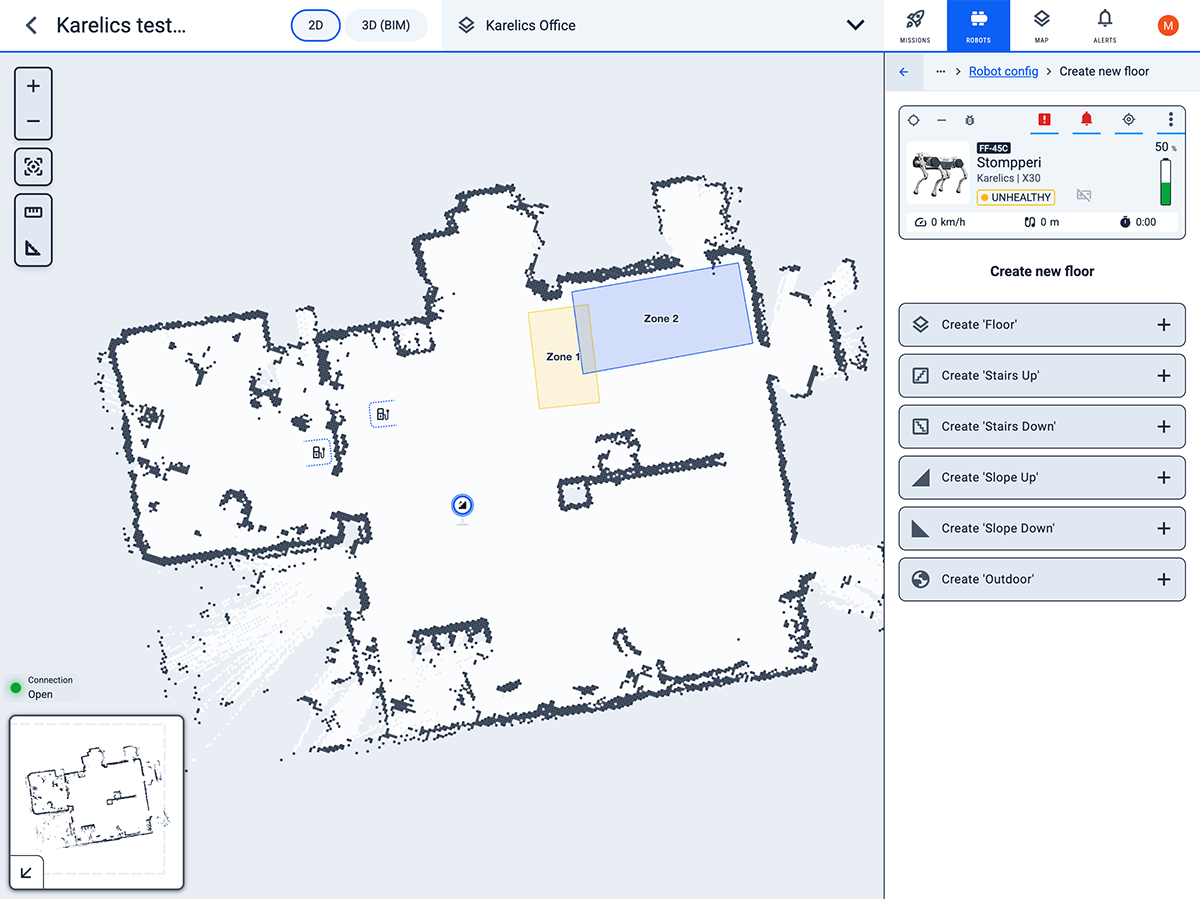
Create 'Floor' Create 'Stairs Up' Create 'Stairs Down' Create 'Slope Up' Create 'Slope Down' Create 'Outdoor'