Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Go to charging station
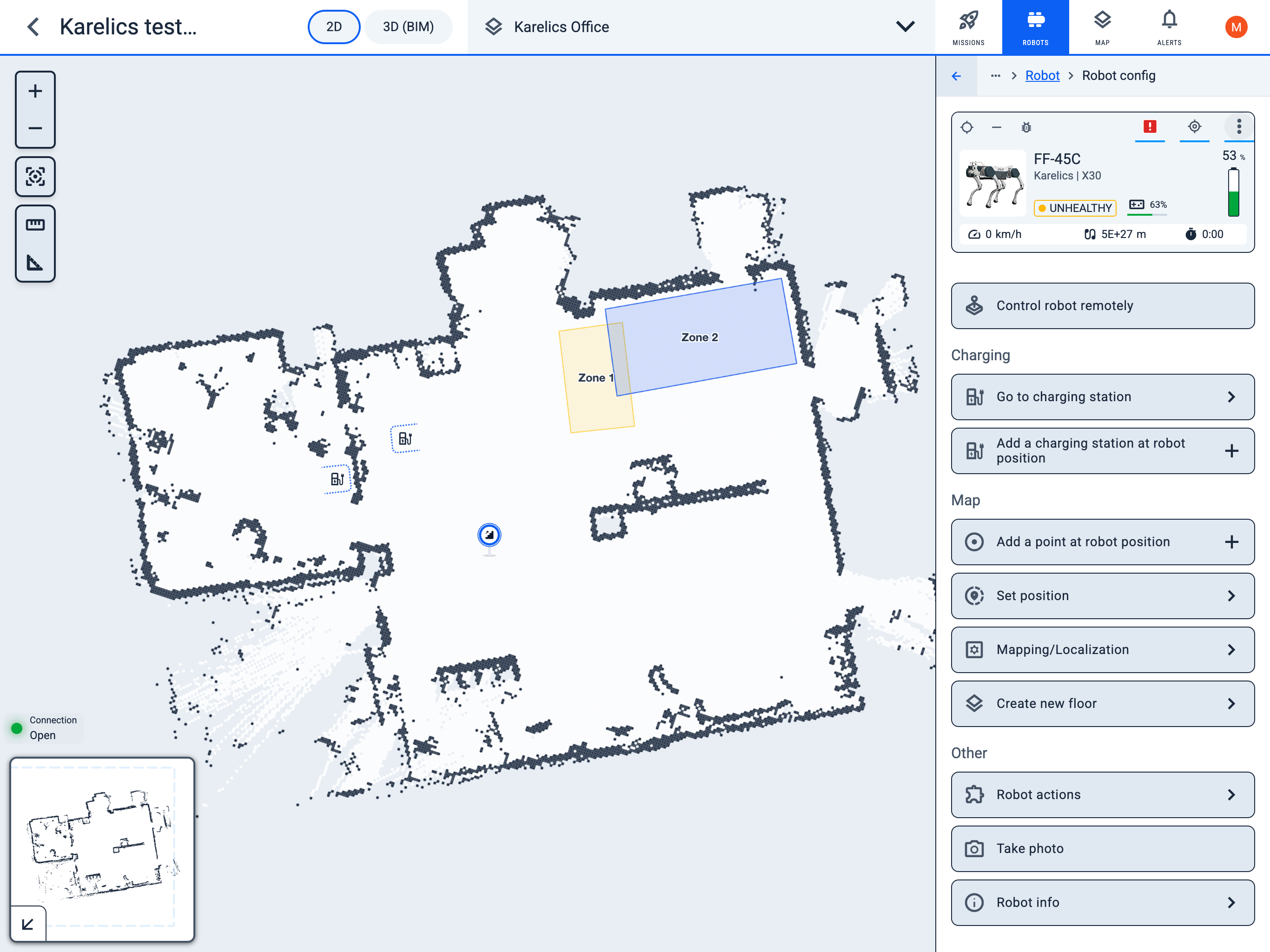
Go to charging station
Navigate robot to charging station.
Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Go to charging station
Navigate robot to charging station.