Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Mapping/Localization
Mapping/Localization
Robot mapping and localization settings.
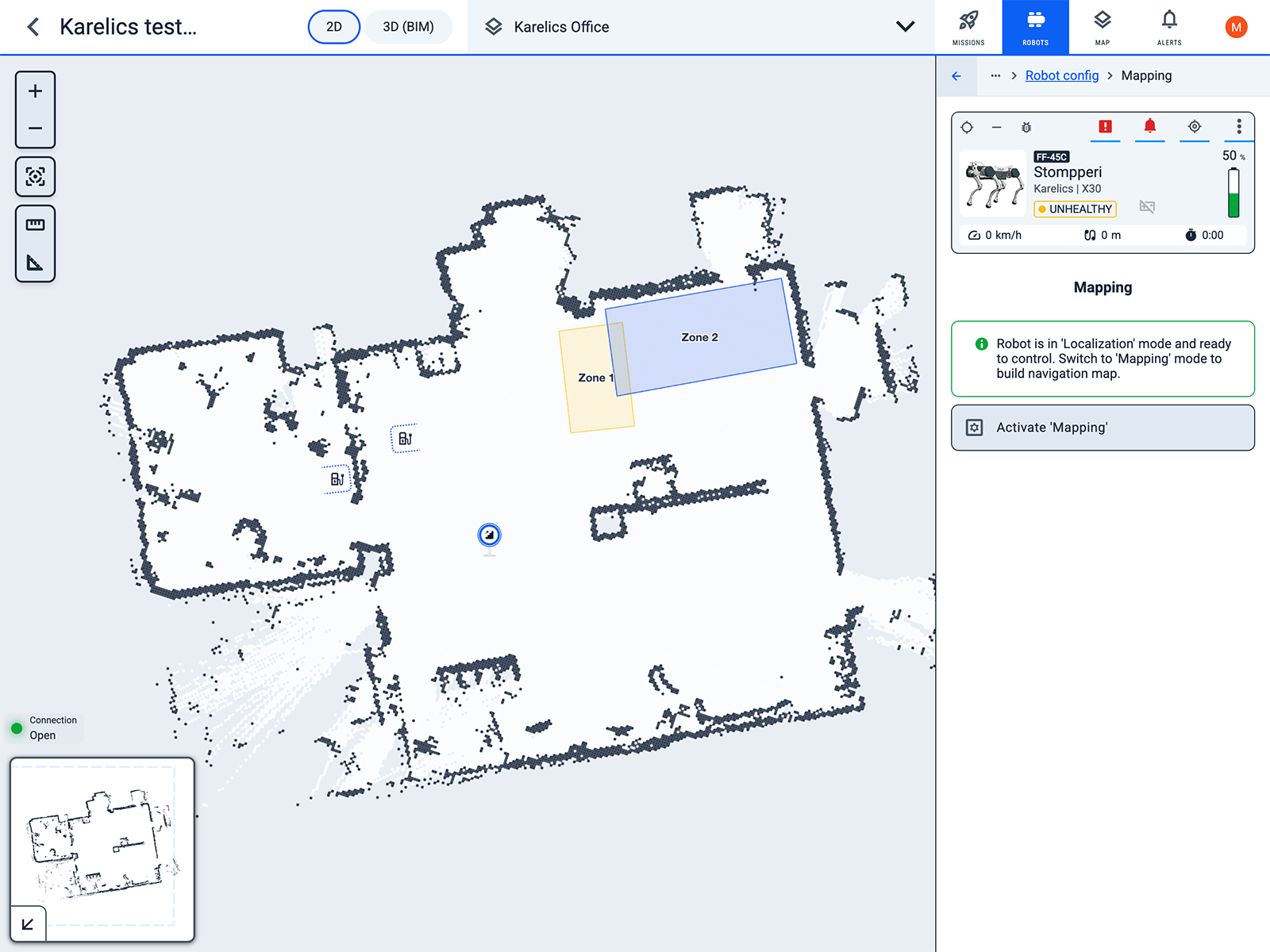
Robot is in 'Localization' mode and ready to control. Switch to 'Mapping' mode to build navigation map.