Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Set position
Set position
Set robot position on the map.
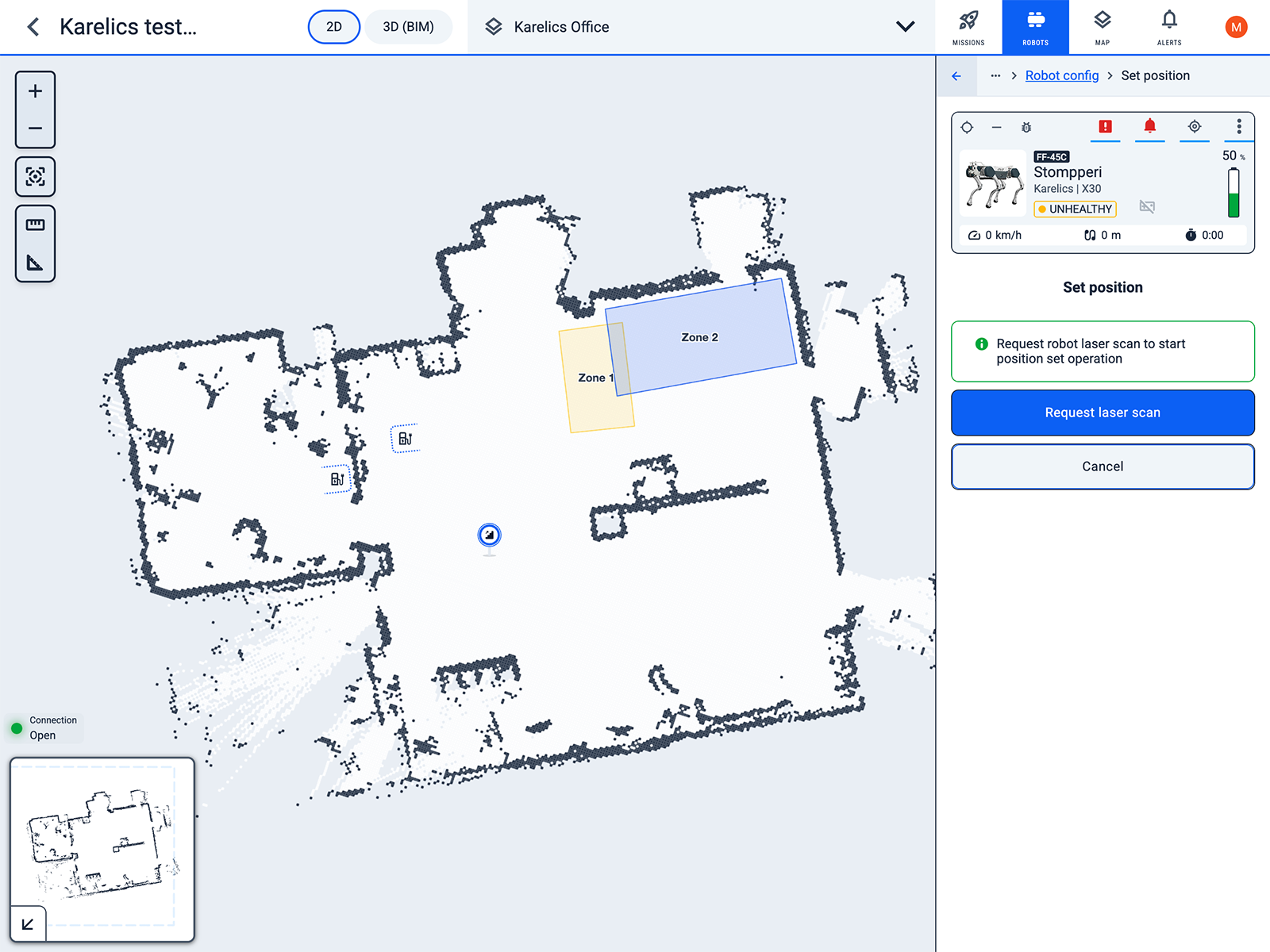
Request robot laser scan to start position set operation
Operator Hub → Current Project → Workspace → Robots → Current Robot → Configuration → Set position
Set robot position on the map.
Request robot laser scan to start position set operation